
Since the last post on this blog, we’ve released numerous updates, which you can read about on our main website https://www.bohemia-automation.com/, along with news about all our new projects. Thank you!
Why there is no RESTful API in EVA ICS v4
EVA ICS v4 is finally out. We have been working on it for years and are finally proud to introduce the new-generation automation platform to all our customers.
In this article I want to explain, why we marked RESTful as a deprecated API in 3.4.2 and completely removed it in v4.
Continue reading “Why there is no RESTful API in EVA ICS v4”EVA ICS replication between v3 and v4
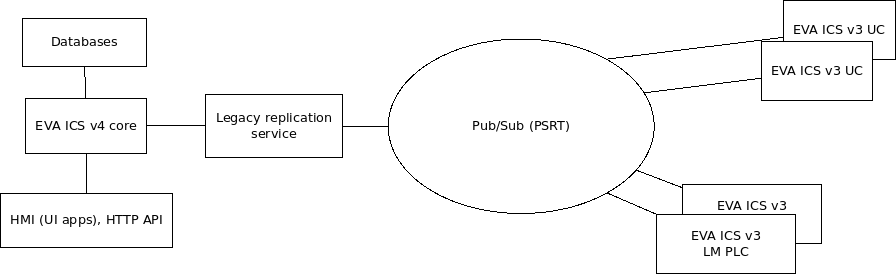
The new-generation EVA ICS v4 “internal alpha” is going to be released in May 2022. The “internal alpha” version will be available to our Enterprise customers only and will have very limited support of hardware equipment / logic, plus no replication between v4 and v4 nodes yet. However, it will be able to fully host UI apps and replicate data from v3 secondaries.
The goal is to:
- test v4 core in production
- replace heavy-loaded v3 SFA controllers
If you are the existing customer and want to try EVA ICS v4 internal alpha, please read the conditions:
v3-v4EVA ICS v4 architecture (draft)
EVA ICS v4 is going to be released this year. How is it different from EVA ICS v3?
Take a look on the schema. The first one is v3 architecture we’ve been using since 2017. And here are the key problems with it:
- The monolith core, written in Python
- After 4 years, the core has got about 6 types of extensions (drivers, core scripts, plugins etc.)
- Majority of plugins can be written in Python only and work directly inside the core, which reduces its stability and performance
- Limited CPU scalability
- Each enterprise setup is unique and requires unique features. All of them go to the core, slowing it down and making it more and more complicated.
But things will be completely different in v4.
Continue reading “EVA ICS v4 architecture (draft)”Policy assisted actions in EVA ICS
I was given by one of our team members of the link to the article, where the joined team of engineers from 3 USA universities reviewed industrial and home automation systems, including EVA ICS. First of all, I must say I am proud and impressed that our platform becomes more and more popular in IoT world, second – I am happy EVA ICS shown the best results in tests, third – I would like to ask the article authors to review EVA ICS 3.3.x, which has got, in comparison to 3.2.x, more improved asynchronous core, which gives huge speed and memory advantages.
However, it was mentioned, EVA ICS has no policy-based actions, which is incorrect, and let me explain how to use them in the real production:
Continue reading “Policy assisted actions in EVA ICS”Building reliable Web SCADA interfaces
Web-based SCADA interfaces require more different approach, than regular web sites.
Why web SCADA?
Pros:
– a properly designed UI can be used on any operator’s device: a smartphone, a tablet, or a desktop computer. It can be opened on any embedded kiosk device with almost any OS inside (of course, unless this OS has a web-browser).
– using a proper front-end web server/web proxy and a proper ACL setup, the UI can be absolutely securely opened from any location.
– classic SCADA software requires skilled professionals, while the web UI can be updated / modified by any IT-engineer, who knows HTML and JavaScript.
Cons: web interfaces are unstable. Sometimes seriously unstable.
In this article we will give some tips about it, no matter which web interface is built for EVA ICS or any other IoT/IIoT platform.
Continue reading “Building reliable Web SCADA interfaces”Future of EVA ICS
EVA ICS version 3 has become the most successful industrial IoT product of our company. It already has dozens of setups we support directly and I hope even more setups we don’t.
But the version 3 has a problem: because of the rapid numbers of customers and features growth, it’s internal architecture was changed several times almost from scratch, lots of stuff already became obsolete and too complicated for beginners.
Here are the plans for the EVA ICS codename “nextgen” (next generation):
Continue reading “Future of EVA ICS”Installing EVA ICS without the Internet connection
Installing EVA ICS on a production machine without the Internet connection is tricky is pretty easy, but Python virtual environment should be manually prepared. Another option is to mirror pypi.org repository, but it requires about 120GB of disk space and isn’t recommended, unless used for another company needs.
In this article we will explain how to install EVA ICS on Debian / Ubuntu machine in the offline mode.
Continue reading “Installing EVA ICS without the Internet connection”Monitoring network equipment with EVA ICS
With EVA ICS any network equipment can be easily monitored. All you need is to download and setup net_watchdog PHI.
net_watchdog PHI can monitor hosts with ping (fping command line program must be installed) and HTTP GET request.
If HTTP request method is used, the module can compare the reply or reply sha256-sum with the specified one.
Continue reading “Monitoring network equipment with EVA ICS”EVA ICS core refractoring and async functions
When we started development of EVA ICS, asynchronous programming just started to be popular. EVA ICS 3 core is thread-based. It works pretty well, doesn’t produce too much memory/CPU load, but it can work even better.
Let me introduce atasker library. This is free, open source Python library, which will solve many problems as in EVA ICS core, as in any other similar project.
Continue reading “EVA ICS core refractoring and async functions”